Desarrollan robot guía para invidentes
Por Hugo Valencia Juliao
México, DF. 31 de julio de 2015 (Agencia Informativa Conacyt).- Egresados de la Escuela Superior de Cómputo (Escom) del Instituto Politécnico Nacional (IPN) desarrollaron el Asistente Móvil Electrónico para Invidentes (AMEPI), un robot que funciona como un perro guía para personas con discapacidad visual.
 “Es un robot que guía a personas invidentes a través de sensores ultrasónicos y cámaras de alta definición, mediante inteligencia artificial en dos vertientes: la lógica difusa y el reconocimiento de patrones”, explicó el ingeniero Manuel Caballero Martínez.
“Es un robot que guía a personas invidentes a través de sensores ultrasónicos y cámaras de alta definición, mediante inteligencia artificial en dos vertientes: la lógica difusa y el reconocimiento de patrones”, explicó el ingeniero Manuel Caballero Martínez.
El especialista participa en este proyecto de la mano con Jessica Sarahí Espinosa López y Francisco Javier García Macías, quienes son egresados de la carrera de Ingeniería en Ciencias Computacionales.
 El robot tiene la funcionalidad de evadir obstáculos y avisarle al invidente las características de su entorno por medio del reconocimiento de símbolos. Además, puede guiar a la persona en ambientes desconocidos.
El robot tiene la funcionalidad de evadir obstáculos y avisarle al invidente las características de su entorno por medio del reconocimiento de símbolos. Además, puede guiar a la persona en ambientes desconocidos.
Este proyecto lleva más de un año en desarrollo, según expuso Jessica Espinosa. “La inquietud nació por la necesidad de crear una tecnología que beneficiara a la sociedad”, dijo y mencionó también que esta innovación podría sustituir a los perros guía, que son de difícil asignación y elevado costo.
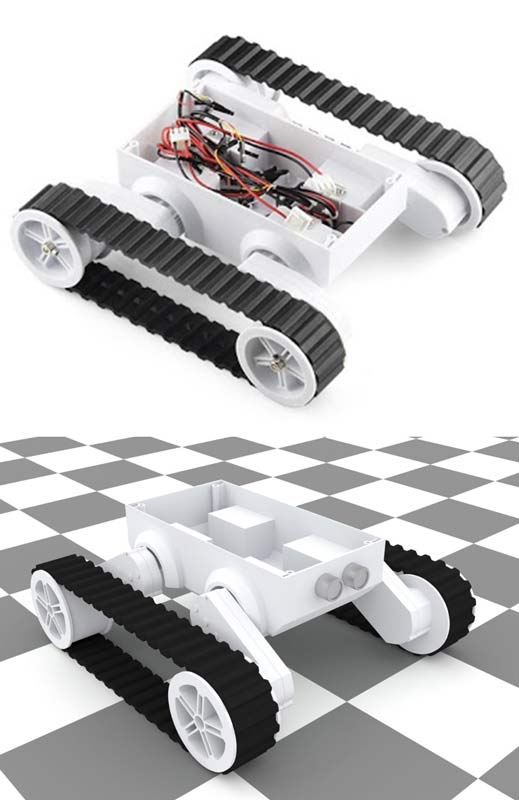
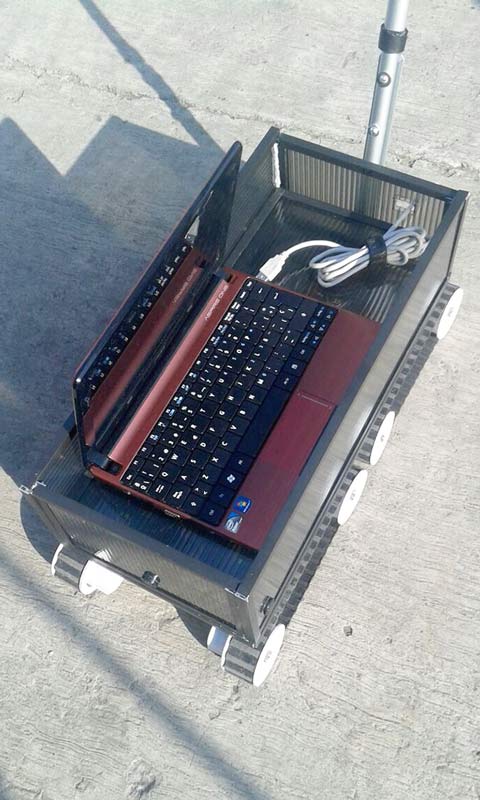
“AMEPI está conformado por tres sensores ultrasónicos, dos cámaras de alta definición, una tracción de oruga diferencial, la cual funciona con seis baterías; también cuenta con una tarjeta Arduino que regula la velocidad y giro de los motores. Además, tiene una diadema inalámbrica con la que el usuario tiene una interacción más intuitiva con el robot”, agregó Caballero Martínez en entrevista para la Agencia Informativa Conacyt.
 El invidente puede darle comandos de voz al robot, así como también puede escuchar las recomendaciones de él. “La idea es que AMEPI reciba órdenes para cada uno de los movimientos que haga; sin embargo, el robot también puede autoexplorar en un ambiente desconocido, reconociendo los obstáculos del camino”, aseguró Espinosa López.
El invidente puede darle comandos de voz al robot, así como también puede escuchar las recomendaciones de él. “La idea es que AMEPI reciba órdenes para cada uno de los movimientos que haga; sin embargo, el robot también puede autoexplorar en un ambiente desconocido, reconociendo los obstáculos del camino”, aseguró Espinosa López.
Los ingenieros coincidieron en que lo más difícil durante el proceso de fabricación del prototipo fue el desarrollo del hardware: “Calibrar las cámaras para que detectara los señalamientos fue bastante complicado, ya que no todos los letreros están a la altura que deberían, como lo sugiere el Manual Técnico de Accesibilidad de la Secretaria de Desarrollo Urbano y Vivienda (Seduvi) del Distrito Federal”.
Acerca de la tecnología con la que cuenta este desarrollo, Manuel Caballero Martínez destacó la inteligencia del robot que proviene del sistema difuso. “Este sistema asimila el pensamiento humano para que el mismo robot pueda interpretar la realidad y tomar decisiones con base en una lógica difusa, es decir, que no está definida”, abundó.
Para los desarrolladores, el siguiente paso es patentar el proyecto y buscar una incubadora con el fin de que el invento pueda seguir creciendo. “Estamos en la fase de prototipo, el cual es funcional; sin embargo, hay detalles que se necesitan desarrollar más a fondo, además de agregar otras funcionalidades”, concluyó Jessica Espinosa López.



Esta obra cuyo autor es Agencia Informativa Conacyt está bajo una licencia de Reconocimiento 4.0 Internacional de Creative Commons.
